proposed by Prof.Satoshi Nishimura

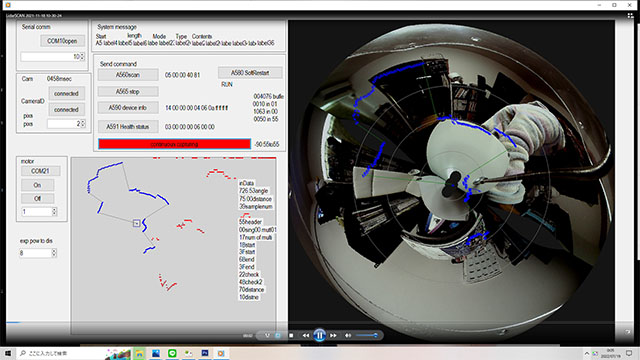

 compared with intel-real sense
compared with intel-real sense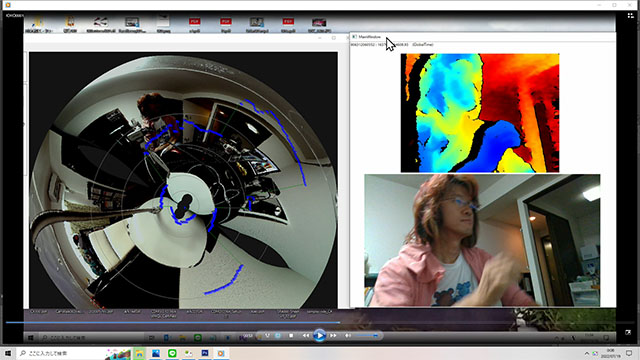 compared with intel-real sense
compared with intel-real sense
using OpenCvSharp;
using System;
using System.Drawing;
using System.Windows.Forms;
using System.Text;
using FTD2XX_NET;
using System.Drawing.Imaging;
using System.Drawing.Drawing2D;
using System.Runtime.InteropServices;
using System.Threading.Tasks;
namespace WindowsFormsApp2
{
public partial class Form1 : Form
{
public int offsetangle = 12000;
public int captflag = 0;
public int resetflag = 0;
public int motorflag = 0;
public int relayon = 0;
const int wid = 480;
public int serialON = 0;
public int prevtime = 0;
public int camprevtime = 0;
/// for image analysis
public byte[] srcData1 = new byte[3 * 640 * wid];
public byte[] srcData2 = new byte[3 * 640 * wid];
public byte[] srcData3 = new byte[3 * 1200 * 1200];
public int[,] disdata = new int[1000, 1000];
public int[] discount = new int[1000];
public int[,] predisdata = new int[10, 1000];
public int[,] moveX = new int[3200, 2400];
public int[,] moveY = new int[3200, 2400];
public int[,] ougiX = new int[1200, 1200];
public int[,] ougiY = new int[1200, 1200];
public int[,] ougitype = new int[1200, 1200];
Bitmap canvasRIGHT = new Bitmap(640, wid);
Bitmap canvasLEFT = new Bitmap(640, wid);
Bitmap canvasCENTER = new Bitmap(1200, 900);
Bitmap canvasDOWN = new Bitmap(1200, 1200);
Bitmap bitmap3 = new Bitmap(1200, 1200);
Graphics Graphics3;
Graphics Graphics4;
/// for VIdeo capturing
public int videoON = 0;
public int videoON2 = 0;
VideoCapture VideoCapture1;
Mat Mat1;
VideoCapture VideoCapture2;
Mat Mat2;
/// for RELAY BOARD
public FTDI ftdi = new FTDI();
public uint receivedBytes;
private byte[] sentBytes = new byte[2];
public Form1()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{
// Graphics1.DrawImage(bitmap1, 0, 0, Mat1.Cols, Mat1.Rows);
// for lidar mapping
Graphics3 = Graphics.FromImage(canvasCENTER);
Graphics3.Clear(Color.LightGray);
pictureBox3.Image = canvasCENTER;
Graphics4 = Graphics.FromImage(canvasDOWN);
pictureBox10.Image = canvasDOWN;
// make zero time
DateTime dt4 = DateTime.Now;
prevtime = ((dt4.Hour * 60 + dt4.Minute) * 60 + dt4.Second) * 1000 + dt4.Millisecond;
camprevtime = prevtime;
// INIT data
// resetimage array
for (int pixelX = 0; pixelX < 640; pixelX++)
{
for (int pixelY = 0; pixelY < wid; pixelY++)
{
int indexR, indexG, indexB;
indexR = (pixelX + pixelY * 640) * 3 + 2; //r
indexG = (pixelX + pixelY * 640) * 3 + 1; //g
indexB = (pixelX + pixelY * 640) * 3 + 0; //b
srcData1[indexR] = 0;
srcData1[indexG] = 0;
srcData1[indexB] = 0;
srcData2[indexR] = 0;
srcData2[indexG] = 0;
srcData2[indexB] = 0;
}
}
for (int pixelX = 0; pixelX < 1200; pixelX++)
{
for (int pixelY = 0; pixelY < 1200; pixelY++)
{
int indexR, indexG, indexB;
indexR = (pixelX + pixelY * 1200) * 3 + 2; //r
indexG = (pixelX + pixelY * 1200) * 3 + 1; //g
indexB = (pixelX + pixelY * 1200) * 3 + 0; //b
srcData3[indexR] = 0;
srcData3[indexG] = 0;
srcData3[indexB] = 0;
}
}
// reset distance array
for (int k = 0; k < 1000; k++)
{
discount[k] = 0;
for (int l = 0; l < 10; l++)
{
predisdata[l, k] = 0;
}
}
// reset trans array, lens adujust
for (int kx = 0; kx < 3200; kx++)
{
for (int ky = 0; ky < 2400; ky++)
{
moveX[kx, ky] = -1;
moveY[kx, ky] = -1;
}
}
////////////////////////////////////
distortion(0.4);
// reset ougi map
for (int kx = 0; kx < 1200; kx++)
{
for (int ky = 0; ky < 1200; ky++)
{
ougitype[kx, ky] = -1;
ougiX[kx, ky] = -1;
ougiY[kx, ky] = -1;
}
}
////////////////make ougi ////////////////////////////
int picx, picy;
int compx = 400, compy = 400, angle1 = 240, ratio3 = 3 ;
for (int xx = compx; xx < 3200-compx; xx++)
{
for (int yy = compy; yy < 2400-compy; yy++)
{
double angle = (180-(double)xx / 3200 *angle1) * Math.PI / 180.0;
double radius = (double)((6200 - ratio3 * yy) * 0.1);
picx = (int)(Math.Cos(angle) * radius + 600);
picy = 1200-(int)(Math.Sin(angle) * radius + 600);
/// maximum 1000
ougitype[picx, picy] = 1;
ougiX[picx, picy] =moveX[xx,yy];
ougiY[picx, picy] =moveY[xx,yy];
}
}
for (int xx = compx; xx < 3200-compx; xx++)
{
for (int yy = compy; yy < 2400-compy; yy++)
{
double angle = (360 - (double)xx / 3200 * angle1) * Math.PI / 180.0;
double radius = (double)((6200 - ratio3 * yy) * 0.1);
picx = (int)(Math.Cos(angle) * radius + 600);
picy = 1200 - (int)(Math.Sin(angle) * radius + 600);
/// maximum 1000
ougitype[picx, picy] = 2;
ougiX[picx, picy] = moveX[xx, yy];
ougiY[picx, picy] = moveY[xx, yy];
}
}
// camera number
numericUpDown1.Value = 0;
numericUpDown1.Minimum = 0;
numericUpDown1.Maximum = 5;
numericUpDown1.TextAlign = HorizontalAlignment.Right;
numericUpDown1.Increment = 1;
// serial communication port
numericUpDown8.Value = 10;
numericUpDown8.Minimum = 8;
numericUpDown8.Maximum = 12;
numericUpDown8.TextAlign = HorizontalAlignment.Right;
numericUpDown8.Increment = 1;
}
private void button1_Click(object sender, EventArgs e)
{
////////////////// OPEN CAMERA ////////////////////////
if (numericUpDown1.Value == 0) { VideoCapture1 = new VideoCapture(0); }
if (numericUpDown1.Value == 1) { VideoCapture1 = new VideoCapture(1); }
if (numericUpDown1.Value == 2) { VideoCapture1 = new VideoCapture(2); }
if (numericUpDown1.Value == 3) { VideoCapture1 = new VideoCapture(3); }
if (numericUpDown1.Value == 4) { VideoCapture1 = new VideoCapture(4); }
if (numericUpDown1.Value == 5) { VideoCapture1 = new VideoCapture(5); }
if (!VideoCapture1.IsOpened())
{
MessageBox.Show("camera not found");
videoON = 0;
}
else
{
// Graphics1 = pictureBox3.CreateGraphics();
videoON++;
// using (Mat1 = new Mat(0, 0, MatType.CV_8UC3))
//{
// VideoCapture1.Read(Mat1);
// using (Bitmap bitmap1 = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(Mat1))
// {
// label1.Text = Mat1.Cols.ToString();
// label10.Text = Mat1.Rows.ToString();
button1.Text = "connected";
timer1.Enabled = true;
timer1.Interval = 20;
// }
//}
}
}
private void button3_Click(object sender, EventArgs e)
{
//////////////// OPEN CAMERA 2
if (numericUpDown1.Value == 0) { VideoCapture2 = new VideoCapture(0); }
if (numericUpDown1.Value == 1) { VideoCapture2 = new VideoCapture(1); }
if (numericUpDown1.Value == 2) { VideoCapture2 = new VideoCapture(2); }
if (numericUpDown1.Value == 3) { VideoCapture2 = new VideoCapture(3); }
if (numericUpDown1.Value == 4) { VideoCapture2 = new VideoCapture(4); }
if (numericUpDown1.Value == 5) { VideoCapture2 = new VideoCapture(5); }
if (!VideoCapture2.IsOpened())
{
MessageBox.Show("camera2 not found");
videoON2 = 0;
}
// else
{
// Graphics2 = pictureBox6.CreateGraphics();
videoON2++;
button3.Text = "connected";
// using (Mat2 = new Mat(0, 0, MatType.CV_8UC3))
// {
// VideoCapture2.Read(Mat2);
// using (Bitmap bitmap2 = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(Mat2))
// {
// }
// }
timer1.Enabled = true;
timer1.Interval = 20;
}
}
private void Form1_FormClosing(object sender, FormClosingEventArgs e)
{
////////////////// CLOSE //////////////////////////
if (videoON != 0)
{
VideoCapture1.Dispose();
// Graphics1.Dispose();
}
if (videoON2 != 0)
{
VideoCapture2.Dispose();
// Graphics2.Dispose();
}
if (serialON > 0)
{
serialPort1.Close();
}
if (relayon > 0)
{
sentBytes[0] = 0x00;
ftdi.Write(sentBytes, 1, ref receivedBytes);
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 50;)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
}
ftdi.Close();
}
}
private void timer1_Tick(object sender, EventArgs e)
{
DateTime dt5 = DateTime.Now;
int now2time = ((dt5.Hour * 60 + dt5.Minute) * 60 + dt5.Second) * 1000 + dt5.Millisecond;
int elltime = now2time - camprevtime;
camprevtime = now2time;
label15.Text = elltime.ToString("D4") + "msec";
timer1.Enabled = false;
///// BMP SAVE
if (videoON != 0 && videoON2 != 0)
{
using (Mat1 = new Mat(0, 0, MatType.CV_8UC3))
{
using (Mat2 = new Mat(0, 0, MatType.CV_8UC3))
{
VideoCapture2.Read(Mat2);
VideoCapture1.Read(Mat1);
using (Bitmap bitmap1 = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(Mat1))
{
using (Bitmap bitmap2 = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(Mat2))
{
// EXCLUSIVE use image data for "bmpdata"//
System.Drawing.Imaging.BitmapData bmpData1 = bitmap1.LockBits(new Rectangle(0, 0, bitmap1.Width, bitmap1.Height), System.Drawing.Imaging.ImageLockMode.ReadWrite, bitmap1.PixelFormat);
System.Runtime.InteropServices.Marshal.Copy(bmpData1.Scan0, srcData1, 0, srcData1.Length);
System.Drawing.Imaging.BitmapData bmpData2 = bitmap2.LockBits(new Rectangle(0, 0, bitmap2.Width, bitmap2.Height), System.Drawing.Imaging.ImageLockMode.ReadWrite, bitmap2.PixelFormat);
System.Runtime.InteropServices.Marshal.Copy(bmpData2.Scan0, srcData2, 0, srcData2.Length);
System.Drawing.Imaging.BitmapData bmpData3 = bitmap3.LockBits(new Rectangle(0, 0, bitmap3.Width, bitmap3.Height), System.Drawing.Imaging.ImageLockMode.ReadWrite, bitmap2.PixelFormat);
System.Runtime.InteropServices.Marshal.Copy(bmpData3.Scan0, srcData3, 0, srcData3.Length);
for (int pixelX = 0; pixelX < 1200; pixelX++)
{
for (int pixelY = 0; pixelY < 1200; pixelY++)
{
int indexR, indexG, indexB;
indexR = (pixelX + pixelY * 1200) * 3 + 2; //r
indexG = (pixelX + pixelY * 1200) * 3 + 1; //g
indexB = (pixelX + pixelY * 1200) * 3 + 0; //b
srcData3[indexR] = 20;
srcData3[indexG] = 20;
srcData3[indexB] = 20;
if (ougitype[pixelX, pixelY] == 1)
{
if (ougiX[pixelX, pixelY] > 0 && ougiY[pixelX, pixelY] > 0)
{
int xr, xg, xb;
xr = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 2; //r
xg = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 1; //g
xb = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 0; //b
int rpix = srcData1[xr] - 50;
int gpix = srcData1[xg] - 50;
int bpix = srcData1[xb] - 50;
if (rpix < 0) { rpix = 0; }
if (gpix < 0) { gpix = 0; }
if (bpix < 0) { bpix = 0; }
srcData3[indexR] = (byte)rpix;
srcData3[indexG] = (byte)gpix;
srcData3[indexB] = (byte)bpix;
}
}
else if (ougitype[pixelX, pixelY] == 2)
{
if (ougiX[pixelX, pixelY] > 0 && ougiY[pixelX, pixelY] > 0)
{
int xr, xg, xb;
xr = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 2; //r
xg = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 1; //g
xb = (ougiX[pixelX, pixelY] + ougiY[pixelX, pixelY] * 640) * 3 + 0; //b
int rpix = srcData2[xr] - 50;
int gpix = srcData2[xg] - 50;
int bpix = srcData2[xb] - 50;
if (rpix < 0) { rpix = 0; }
if (gpix < 0) { gpix = 0; }
if (bpix < 0) { bpix = 0; }
srcData3[indexR] = (byte)rpix;
srcData3[indexG] = (byte)gpix;
srcData3[indexB] = (byte)bpix;
}
}
else
{
}
}
}
// UNLOCK BITS
System.Runtime.InteropServices.Marshal.Copy(srcData3, 0, bmpData3.Scan0, srcData3.Length);
System.Runtime.InteropServices.Marshal.Copy(srcData2, 0, bmpData2.Scan0, srcData2.Length);
System.Runtime.InteropServices.Marshal.Copy(srcData1, 0, bmpData1.Scan0, srcData1.Length);
bitmap1.UnlockBits(bmpData1);
bitmap2.UnlockBits(bmpData2);
bitmap3.UnlockBits(bmpData3);
// Graphics1.DrawImage(bitmap1, 0, 0, Mat1.Cols, Mat1.Rows);
// Graphics2.DrawImage(bitmap2, 0, 0, Mat2.Cols, Mat2.Rows);
Graphics4.DrawImage(bitmap3, -100, -100, 1200, 1200);
if (captflag > 0)
{
for (int o = 10; o < 549; o++)
{
int disabi = 0, nexabi = 0;
if ((predisdata[1, o] - predisdata[0, o]) * (predisdata[1, o] - predisdata[0, o]) < 100)
{
disabi = predisdata[0, o];
}
else if ((predisdata[2, o] - predisdata[1, o]) * (predisdata[2, o] - predisdata[1, o]) < 100)
{
disabi = predisdata[1, o];
}
else
{
disabi = predisdata[2, o];
}
if ((predisdata[1, o + 1] - predisdata[0, o + 1]) * (predisdata[1, o + 1] - predisdata[0, o + 1]) < 100)
{
nexabi = predisdata[0, o + 1];
}
else if ((predisdata[2, o + 1] - predisdata[1, o + 1]) * (predisdata[2, o + 1] - predisdata[1, o + 1]) < 100)
{
nexabi = predisdata[1, o + 1];
}
else
{
nexabi = predisdata[2, o + 1];
}
int pix1, pix2, piy1, piy2;
pix1 = (int)(Math.Cos((double)o / 72) * (double)disabi / 2) * 2;
piy1 = (int)(Math.Sin((double)o / 72) * (double)disabi / 2) * 2;
pix2 = (int)(Math.Cos((double)(o + 1) / 72) * (double)nexabi / 2) * 2;
piy2 = (int)(Math.Sin((double)(o + 1) / 72) * (double)nexabi / 2) * 2;
if (disabi != 0 && nexabi != 0 && (disabi - nexabi) * (disabi - nexabi) < 1000)
{
Graphics4.DrawLine(Pens.Blue, pix1 + 500, piy1 + 500, pix2 + 500, piy2 + 500);
}
else
{
Graphics4.DrawLine(Pens.Green, pix1 + 500, piy1 + 500, pix2 + 500, piy2 + 500);
}
Graphics4.DrawRectangle(Pens.Blue, pix1 + 501, piy1 + 501, 2, 2);
Graphics4.DrawRectangle(Pens.Blue, pix1 + 502, piy1 + 502, 4, 4);
}
Graphics4.DrawEllipse(Pens.Gray, 400, 400, 200, 200);
Graphics4.DrawEllipse(Pens.Gray, 450, 450, 100, 100);
Graphics4.DrawEllipse(Pens.Gray, 300, 300, 400, 400);
Graphics4.DrawEllipse(Pens.Gray, 200, 200, 600, 600);
}
pictureBox10.Image = canvasDOWN;
}
}
}
}
}
timer1.Enabled = true;
}
private void button2_Click_1(object sender, EventArgs e)
{
///////////////// OPEN SERIAL PORT
try
{
if (numericUpDown8.Value == 8)
{
serialPort1.PortName = "COM8";
}
else if (numericUpDown8.Value == 9)
{
serialPort1.PortName = "COM9";
}
else if (numericUpDown8.Value == 10)
{
serialPort1.PortName = "COM10";
}
else if (numericUpDown8.Value == 11)
{
serialPort1.PortName = "COM11";
}
else
{
serialPort1.PortName = "COM20";
}
serialPort1.BaudRate = 128000;
serialPort1.Parity = System.IO.Ports.Parity.None;
serialPort1.DataBits = 8;
serialPort1.StopBits = System.IO.Ports.StopBits.One;
serialPort1.Open();
button2.Text = serialPort1.PortName + "open";
serialON++;
}
catch (Exception ex)
{
MessageBox.Show(ex.Message, "error to serial open", MessageBoxButtons.OK, MessageBoxIcon.Stop);
}
}
private void button4_Click_1(object sender, EventArgs e)
{
// A560 SCAN command
timer2.Enabled = false;
serialPort1.RtsEnable = false;
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x60;
byte[] readdata = new byte[12];
for (int i = 0; i < 12; i++)
{
readdata[i] = 0xFF;
}
serialPort1.Write(edata, 0, edata.Length);
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 100;)
{
if (serialPort1.BytesToRead > 0)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
int dcheck;
serialPort1.Read(readdata, 0, 1);
dcheck = readdata[0];
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
if (dcheck == 0xA5)
{
counti = counti + 2000;
}
label4.Text = readdata[0].ToString("x2");
}
}
if (serialPort1.BytesToRead > 12)
{
serialPort1.Read(readdata, 0, 12);
}
label4.Text = readdata[0].ToString("x2");
label5.Text = readdata[1].ToString("x2");
label6.Text = readdata[2].ToString("x2");
label7.Text = readdata[3].ToString("x2");
label23.Text = readdata[4].ToString("x2");
label24.Text = readdata[5].ToString("x2");
label25.Text = readdata[6].ToString("x2");
label26.Text = readdata[7].ToString("x2");
label33.Text = readdata[8].ToString("x2");
label34.Text = readdata[9].ToString("x2");
label35.Text = readdata[10].ToString("x2");
label36.Text = readdata[11].ToString("x2");
serialPort1.RtsEnable = true;
timer2.Enabled = true;
}
private void button5_Click_1(object sender, EventArgs e)
{
// A565 stop
timer2.Enabled = false;
serialPort1.RtsEnable = false;
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x65;
serialPort1.Write(edata, 0, edata.Length);
serialPort1.RtsEnable = true;
timer2.Enabled = true;
}
private void button6_Click_1(object sender, EventArgs e)
{
// A590 device info command
serialPort1.RtsEnable = false;
timer2.Enabled = false;
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x90;
byte[] readdata = new byte[12];
for (int i = 0; i < 12; i++)
{
readdata[i] = 0xFF;
}
serialPort1.Write(edata, 0, edata.Length);
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 100;)
{
if (serialPort1.BytesToRead > 0)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
int dcheck;
serialPort1.Read(readdata, 0, 1);
dcheck = readdata[0];
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
if (dcheck == 0xA5)
{
counti = counti + 2000;
}
label4.Text = readdata[0].ToString("x2");
}
}
if (serialPort1.BytesToRead > 12)
{
serialPort1.Read(readdata, 0, 12);
}
label4.Text = readdata[0].ToString("x2");
label5.Text = readdata[1].ToString("x2");
label6.Text = readdata[2].ToString("x2");
label7.Text = readdata[3].ToString("x2");
label23.Text = readdata[4].ToString("x2");
label24.Text = readdata[5].ToString("x2");
label25.Text = readdata[6].ToString("x2");
label26.Text = readdata[7].ToString("x2");
label33.Text = readdata[8].ToString("x2");
label34.Text = readdata[9].ToString("x2");
label35.Text = readdata[10].ToString("x2");
label36.Text = readdata[11].ToString("x2");
serialPort1.RtsEnable = true;
timer2.Enabled = true;
}
private void button7_Click_1(object sender, EventArgs e)
{
timer1.Enabled = false;
///// BMP SAVE
///
if (videoON != 0 && videoON2 != 0)
{
Random r1 = new System.Random();
int filenum = r1.Next(0, 100);
bitmap3.Save(
@"D:\HDMIcapture2\backup.jpg",
System.Drawing.Imaging.ImageFormat.Jpeg
);
}
timer1.Enabled = true;
}
private void button8_Click_1(object sender, EventArgs e)
{
//a591 health status
serialPort1.RtsEnable = false;
timer2.Enabled = false;
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x91;
byte[] readdata = new byte[12];
for (int i = 0; i < 12; i++)
{
readdata[i] = 0xFF;
}
serialPort1.Write(edata, 0, edata.Length);
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 100;)
{
if (serialPort1.BytesToRead > 0)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
int dcheck;
serialPort1.Read(readdata, 0, 1);
dcheck = readdata[0];
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
if (dcheck == 0xA5)
{
counti = counti + 2000;
}
label4.Text = readdata[0].ToString("x2");
}
}
if (serialPort1.BytesToRead > 12)
{
serialPort1.Read(readdata, 0, 12);
}
label4.Text = readdata[0].ToString("x2");
label5.Text = readdata[1].ToString("x2");
label6.Text = readdata[2].ToString("x2");
label7.Text = readdata[3].ToString("x2");
label23.Text = readdata[4].ToString("x2");
label24.Text = readdata[5].ToString("x2");
label25.Text = readdata[6].ToString("x2");
label26.Text = readdata[7].ToString("x2");
label33.Text = readdata[8].ToString("x2");
label34.Text = readdata[9].ToString("x2");
label35.Text = readdata[10].ToString("x2");
label36.Text = readdata[11].ToString("x2");
serialPort1.RtsEnable = true;
timer2.Enabled = true;
}
private void numericUpDown1_ValueChanged(object sender, EventArgs e)
{
}
private void pictureBox3_Click(object sender, EventArgs e)
{
}
private void waitsecone()
{
timer1.Stop();
timer1.Enabled = false;
if (videoON != 0) ////////////////////HDMI CAM ON??? ////////////////////
{
using (Mat1 = new Mat(0, 0, MatType.CV_8UC3)) // for HDMI CAPTURE
{
int counti = 0;
int nowsec = 0;
int waittime = 5;
DateTime dt = DateTime.Now;
nowsec = dt.Second;
waittime = nowsec + 1;
if (nowsec == 59)
{
waittime = 0;
}
for (counti = 0; counti < 1;)
{
VideoCapture1.Read(Mat1);
using (Bitmap bitmap1 = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(Mat1))
{
}
DateTime dt2 = DateTime.Now;
nowsec = dt2.Second;
if (nowsec == waittime)
{
counti++;
}
}
}
}
timer1.Start();
timer1.Enabled = true;
}
private void button10_Click_1(object sender, EventArgs e)
{
//a580 soft restart
timer2.Enabled = false;
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x80;
byte[] readdata = new byte[12];
for (int i = 0; i < 12; i++)
{
readdata[i] = 0xFF;
}
serialPort1.Write(edata, 0, edata.Length);
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 100;)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
if (serialPort1.BytesToRead > 0)
{
string indata = serialPort1.ReadExisting();
label16.Text = indata;
}
}
timer2.Enabled = true;
}
private void button11_Click_1(object sender, EventArgs e)
{
//continuous capturing start
if (captflag == 0)
{
captflag = 1;
button11.BackColor = Color.Red;
timer2.Enabled = true;
timer2.Interval = 100;
timer2.Start();
serialPort1.RtsEnable = true;
if (motorflag == 1)
{
sentBytes[0] = 0xFF;
ftdi.Write(sentBytes, 1, ref receivedBytes);
motorflag = 2;
}
if (serialPort1.BytesToRead > 12)
{
byte[] readdata = new byte[12];
for (int i = 0; i < 12; i++)
{
readdata[i] = 0xFF;
}
serialPort1.Read(readdata, 0, 12);
label4.Text = readdata[0].ToString("x2");
label5.Text = readdata[1].ToString("x2");
label6.Text = readdata[2].ToString("x2");
label7.Text = readdata[3].ToString("x2");
label23.Text = readdata[4].ToString("x2");
label24.Text = readdata[5].ToString("x2");
label25.Text = readdata[6].ToString("x2");
label26.Text = readdata[7].ToString("x2");
label33.Text = readdata[8].ToString("x2");
label34.Text = readdata[9].ToString("x2");
label35.Text = readdata[10].ToString("x2");
label36.Text = readdata[11].ToString("x2");
}
}
else
{
captflag = 0;
button11.BackColor = Color.LightGray;
timer2.Enabled = false;
timer2.Stop();
serialPort1.RtsEnable = false;
}
}
public void timer2task()
{
if (captflag > 0)
{
byte[] edata = new byte[2];
edata[0] = 0xA5;
edata[1] = 0x60;
DateTime dt1 = DateTime.Now;
if (resetflag > 1)
{
edata[0] = 0xA5;
edata[1] = 0x80;
serialPort1.Write(edata, 0, edata.Length);
resetflag = 0;
}
// dis array
for (int k = 0; k < 1000; k++)
{
discount[k] = 0;
}
for (int countj = 0; countj < 3; countj++)
{
serialPort1.Write(edata, 0, edata.Length);
}
DateTime dt2 = DateTime.Now;
int starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
int prev = 0;
int jmax = 0;
for (int counti = 0; counti < 15;)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
if ((nowtime - starttime) > 30)
{
counti = counti + 5000;
}
if (serialPort1.BytesToRead > 40)
{
counti = counti + 5000;
string indata = serialPort1.ReadExisting();
byte[] bytes = Encoding.Default.GetBytes(indata);
counti = counti + 500;
int jlong = bytes.Length;
label13.Text = jlong.ToString("D6") + " buffe";
if (jmax < jlong)
{
jmax = jlong;
}
int[] intdata = new int[jlong];
for (int i = 0; i < jlong; i++)
{
intdata[i] = (int)bytes[i];
}
int l = 0;
int m = 0;
int n = 0;
Graphics3.Clear(Color.LightGray);
for (int k = 0; k < jlong - 20; k++)
{
if (intdata[k] == 0x55)
{
int intv = (prev - k);
prev = k;
label2.Text = intv.ToString() + ":55to55";
n++;
int i = k;
label41.Text = intdata[i].ToString("X2") + "header";
label42.Text = intdata[i + 1].ToString("X2") + "sing00 mutl01";
label43.Text = intdata[i + 2].ToString("X2") + "num of multi";
label44.Text = intdata[i + 3].ToString("X2") + "start";
label45.Text = intdata[i + 4].ToString("X2") + "start";
label46.Text = intdata[i + 5].ToString("X2") + "end";
label47.Text = intdata[i + 6].ToString("X2") + "end";
label48.Text = intdata[i + 7].ToString("X2") + "check";
label49.Text = intdata[i + 8].ToString("X2") + "check2";
label50.Text = intdata[i + 9].ToString("X2") + "distance";
label51.Text = intdata[i + 10].ToString("X2") + "distne"; ;
int endangle, startangle, diffangle, samplenum;
double nowangle, nowdis;
endangle = intdata[i + 6] * 256 * 256 / 2 + intdata[i + 5];
startangle = intdata[i + 4] * 256 * 256 / 2 + intdata[i + 3];
samplenum = intdata[i + 2] - 1;
if (samplenum < 1)
{
samplenum = 1;
}
endangle = endangle / 128+offsetangle;
startangle = startangle / 128+offsetangle;
if (endangle > startangle)
{
diffangle = (endangle - startangle) / samplenum;
for (int countk = 0; countk < samplenum; countk++)
{
if ((i + 10 + countk * 2) < jlong)
{
nowdis = intdata[i + 10 + countk * 2] * 256 * 256 + intdata[i + 9 + countk * 2];
nowangle = startangle + countk * diffangle;
if (nowdis < 0.01)
{
}
else
{
// nowangle = nowangle + Math.Atan(21.8 * (155.3 - nowdis) / (155.3 * nowdis));
int nv2 = (int)numericUpDown2.Value;
if (nv2 < 2)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis * 20;
}
else if (nv2 < 3)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis * 5;
}
else if (nv2 < 4)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis;
}
else if (nv2 < 5)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 5;
}
else if (nv2 < 6)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 10;
}
else if (nv2 < 7)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 50;
}
else if (nv2 < 8)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 120;
}
else if (nv2 < 9)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 600;
}
else if (nv2 < 10)
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 2000;
}
else
{
nowdis = Math.Pow((double)nowdis, (double)nv2 / 10);
nowdis = nowdis / 10000;
}
}
nowangle = nowangle / 60;
label52.Text = nowangle.ToString("F2") + "angle";
label53.Text = nowdis.ToString("F2") + "distance";
label54.Text = samplenum.ToString() + "samplenum";
if (samplenum > 0 && diffangle < 300 && diffangle > 70)
{
// Graphics3.DrawRectangle(Pens.Red, (int)nowangle, (int)nowdis, 2, 2);
disdata[(int)nowangle, discount[(int)nowangle]] = (int)nowdis;
discount[(int)nowangle] = discount[(int)nowangle] + 1;
int pix, piy;
pix = (int)(Math.Cos(nowangle / 100) * nowdis / 2);
piy = (int)(Math.Sin(nowangle / 100) * nowdis / 2);
// Graphics3.DrawRectangle(Pens.Blue, pix + 200, piy + 200, 2, 2);
}
}
else
{
// Graphics3.DrawRectangle(Pens.Red, 0, 0, 100, 100);
}
}
}
else
{
// endangle = endangle + 0xFFFF / 128;
// diffangle = (endangle - startangle) / samplenum;
}
}
}
pictureBox4.Image = canvasCENTER;
Graphics3.DrawRectangle(Pens.Blue, 190, 190, 20, 20);
for (int o = 0; o < 1000; o++)
{
int middata = 0;
if (discount[o] > 0)
{
int stacknum = discount[o];
int[] stackdata = new int[stacknum];
for (int mm = 0; mm < stacknum; mm++)
{
stackdata[mm] = disdata[o, mm];
}
Array.Sort(stackdata);
middata = stackdata[stacknum / 2];
Graphics3.DrawRectangle(Pens.Red, o, middata, 2, 2);
}
if (middata == 0 && o > 2)
{
if (predisdata[0, o - 1] != 0)
{
middata = predisdata[0, o - 1];
}
else if (predisdata[0, o - 2] != 0)
{
middata = predisdata[0, o - 2];
}
}
predisdata[9, o] = predisdata[8, o];
predisdata[8, o] = predisdata[7, o];
predisdata[7, o] = predisdata[6, o];
predisdata[6, o] = predisdata[5, o];
predisdata[5, o] = predisdata[4, o];
predisdata[4, o] = predisdata[3, o];
predisdata[3, o] = predisdata[2, o];
predisdata[2, o] = predisdata[1, o];
predisdata[1, o] = predisdata[0, o];
predisdata[0, o] = middata;
if ((predisdata[1, o] - predisdata[0, o]) * (predisdata[1, o] - predisdata[0, o]) < 100)
{
// Graphics3.DrawRectangle(Pens.Blue, pix + 200, piy + 200, 2, 2);
}
}
for (int o = 10; o < 549; o++)
{
int disabi = 0, nexabi = 0;
if ((predisdata[1, o] - predisdata[0, o]) * (predisdata[1, o] - predisdata[0, o]) < 100)
{
disabi = predisdata[0, o];
}
else if ((predisdata[2, o] - predisdata[1, o]) * (predisdata[2, o] - predisdata[1, o]) < 100)
{
disabi = predisdata[1, o];
}
else
{
disabi = predisdata[2, o];
}
if ((predisdata[1, o + 1] - predisdata[0, o + 1]) * (predisdata[1, o + 1] - predisdata[0, o + 1]) < 100)
{
nexabi = predisdata[0, o + 1];
}
else if ((predisdata[2, o + 1] - predisdata[1, o + 1]) * (predisdata[2, o + 1] - predisdata[1, o + 1]) < 100)
{
nexabi = predisdata[1, o + 1];
}
else
{
nexabi = predisdata[2, o + 1];
}
int pix1, pix2, piy1, piy2;
pix1 = (int)(Math.Cos((double)o / 72) * (double)disabi / 2);
piy1 = (int)(Math.Sin((double)o / 72) * (double)disabi / 2);
pix2 = (int)(Math.Cos((double)(o + 1) / 72) * (double)nexabi / 2);
piy2 = (int)(Math.Sin((double)(o + 1) / 72) * (double)nexabi / 2);
if (disabi != 0 && nexabi != 0 && (disabi - nexabi) * (disabi - nexabi) < 1000)
{
Graphics3.DrawLine(Pens.Blue, pix1 + 200, piy1 + 200, pix2 + 200, piy2 + 200);
}
else
{
Graphics3.DrawLine(Pens.Gray, pix1 + 200, piy1 + 200, pix2 + 200, piy2 + 200);
}
Graphics3.DrawRectangle(Pens.Blue, pix1 + 200, piy1 + 200, 2, 2);
}
for (int k = 2; k < jlong - 1; k++)
{
if (intdata[k] == 0x01)
{
l++;
}
if (intdata[k] == 0x00)
{
m++;
}
}
label12.Text = l.ToString("D4") + " in 01";
label9.Text = m.ToString("D4") + " in 00";
label22.Text = n.ToString("D4") + " in 55";
}
}
if (jmax < 90 && false)
{
edata[0] = 0xA5;
edata[1] = 0x80;
serialPort1.Write(edata, 0, edata.Length);
dt2 = DateTime.Now;
starttime = ((dt2.Hour * 60 + dt2.Minute) * 60 + dt2.Second) * 1000 + dt2.Millisecond;
for (int counti = 0; counti < 100;)
{
DateTime dt3 = DateTime.Now;
int nowtime = ((dt3.Hour * 60 + dt3.Minute) * 60 + dt3.Second) * 1000 + dt3.Millisecond;
if ((nowtime - starttime) > 250)
{
counti = counti + 5000;
}
if (serialPort1.BytesToRead > 0)
{
string indata = serialPort1.ReadExisting();
label16.Text = indata;
}
}
}
}
}
private void timer2_Tick(object sender, EventArgs e)
{
// check serial transport
// make distance from LIDAR
timer2.Enabled = false;
timer2.Stop();
timer2task();
timer2.Enabled = true;
timer2.Start();
}
private void button9_Click_1(object sender, EventArgs e)
{
FTDI.FT_STATUS ftStatus = FTDI.FT_STATUS.FT_OK;
ftdi = new FTDI();
ftStatus = ftdi.OpenByIndex((byte)(numericUpDown3.Value));
if (ftStatus != FTDI.FT_STATUS.FT_OK)
{
button9.Text = "NO DEVICE";
return;
}
//Reset device
ftStatus = ftdi.ResetDevice();
if (ftStatus != FTDI.FT_STATUS.FT_OK)
{
button9.Text = "NO DEVICE";
return;
}
//Set Baud Rate
ftStatus = ftdi.SetBaudRate(115200);
if (ftStatus != FTDI.FT_STATUS.FT_OK)
{
button9.Text = "NO DEVICE";
return;
}
//Set Bit Bang
ftStatus = ftdi.SetBitMode(255, FTD2XX_NET.FTDI.FT_BIT_MODES.FT_BIT_MODE_SYNC_BITBANG);
if (ftStatus != FTDI.FT_STATUS.FT_OK)
{
button9.Text = "NO DEVICE";
return;
}
if (ftStatus != FTDI.FT_STATUS.FT_OK)
{
button9.Text = "NO DEVICE";
return;
}
else
{
relayon++;
string portName;
ftdi.GetCOMPort(out portName);
button9.Text = portName;
motorflag = 1;
sentBytes[0] = 0x00;
ftdi.Write(sentBytes, 1, ref receivedBytes);
}
}
private void button12_Click_1(object sender, EventArgs e)
{
// motor relay off
if (relayon > 0)
{
sentBytes[0] = 0x00;
ftdi.Write(sentBytes, 1, ref receivedBytes);
motorflag = 1;
}
}
private void button13_Click_1(object sender, EventArgs e)
{
// motorrelay ON
if (relayon > 0)
{
sentBytes[0] = 0xFF;
ftdi.Write(sentBytes, 1, ref receivedBytes);
motorflag = 2;
}
}
public void distortion(double factor)
{
int siHeight = 2400, siWidth = 3200; //??????????????????????
//Calcula a amplitude máxima possível para a imagem e multiplica pelo fator desejados
double amp = 0;
double ang = Math.PI * 0.5;
for (Int32 a = 0; a < siHeight; a++)
{
int y = (int)((siHeight / 2) - amp * Math.Sin(ang));
if ((y < 0) || (y > siHeight))
break;
amp = a;
}
amp = (amp - 2) * (factor < -1 ? -1 : (factor > 1 ? 1 : factor));
int index = ((1 * siWidth) + 1) * 3;
do
{
Int32 y = (Int32)((index / 3) / siWidth);
Int32 x = (index / 3) - (y * siWidth);
Int32 x1, y1;
x1 = siWidth;
y1 = siHeight;
System.Drawing.Point pt = NewPoint(new System.Drawing.Point(x, y), 3200,2400, amp, factor < 0);
//Indice de bytes onde será aplicada o pixel
Int32 dstIndex = ((pt.Y * siWidth) + pt.X) *3;
moveX[pt.X, pt.Y] = (int)(x/5);
moveY[pt.X, pt.Y] = (int)(y/5);
index = index + 3;
} while (index < (3200*2400*3));
}
static public Bitmap BarrelDistortion(Bitmap sourceImage, double factor, Boolean autoCrop, Color backgroundColor,float percent)
{
Bitmap StartImage = null;
BitmapData srcBitmapData = null;
Byte[] srcPixels = null;
Byte[] dstPixels = null;
Bitmap NewImage = null;
BitmapData dstBitmapData = null;
try
{
// Verifica se bpp (Bits Per Pixel) é 8, 24, ou 32
int Depth = System.Drawing.Bitmap.GetPixelFormatSize(sourceImage.PixelFormat);
if (Depth != 8 && Depth != 24 && Depth != 32)
{
throw new ArgumentException("Only 8, 24 and 32 bpp images are supported.");
}
// Recupera a contagem dos componentes de cor
int cCount = Depth / 8;
System.Drawing.Size baseSize = new System.Drawing.Size(sourceImage.Width, sourceImage.Height);
//verifica se é uma imagem de baixa e precisa redimencionar para melhorar a qualidade
//e não gerar serrilhamento da imagem
Int32 maxSize = Math.Max(sourceImage.Width, sourceImage.Height);
baseSize = new System.Drawing.Size((Int32)((float)sourceImage.Width * percent), (Int32)((float)sourceImage.Height * percent));
StartImage = new Bitmap(baseSize.Width, baseSize.Height, sourceImage.PixelFormat);
StartImage.SetResolution(sourceImage.HorizontalResolution, sourceImage.VerticalResolution);
//Cria o objeto de desenho e fundo branco
Graphics g = Graphics.FromImage(StartImage);
g.SmoothingMode = SmoothingMode.AntiAlias;
g.InterpolationMode = InterpolationMode.HighQualityBicubic;
g.PixelOffsetMode = PixelOffsetMode.HighQuality;
g.DrawImage(sourceImage, new Rectangle(-1, -1, baseSize.Width + 1, baseSize.Height + 1), 0, 0, sourceImage.Width, sourceImage.Height, GraphicsUnit.Pixel);
g.Dispose();
// Bloqueia a imagem de origem e copia para o array de bytes e libera a imagem de origem
srcBitmapData = StartImage.LockBits(new Rectangle(0, 0, StartImage.Width, StartImage.Height), ImageLockMode.ReadOnly, StartImage.PixelFormat);
srcPixels = new byte[StartImage.Width * StartImage.Height * (Depth / 8)];
Marshal.Copy(srcBitmapData.Scan0, srcPixels, 0, srcPixels.Length);
StartImage.UnlockBits(srcBitmapData);
srcBitmapData = null;
//Cria o array de bytes da imagem de destino
dstPixels = new Byte[srcPixels.Length];
//Preenche todo o quadro com a cor de fundo selecionada
Int32 index = ((1 * StartImage.Width) + 1) * cCount; //index = ((Y * Width) + X) * cCount
do
{
if (Depth == 32) // Para 32 bpp define Red, Green, Blue e Alpha
{
dstPixels[index++] = backgroundColor.B;
dstPixels[index++] = backgroundColor.G;
dstPixels[index++] = backgroundColor.R;
dstPixels[index++] = backgroundColor.A; // a
}
if (Depth == 24) // Para 24 bpp define Red, Green e Blue
{
dstPixels[index++] = backgroundColor.B;
dstPixels[index++] = backgroundColor.G;
dstPixels[index++] = backgroundColor.R;
}
if (Depth == 8)
// Para 8 bpp define o valor da cor (Red, Green and Blue como sendo a mesma coisa)
{
dstPixels[index++] = backgroundColor.B;
}
} while (index < srcPixels.Length);
//Calcula a amplitude máxima possível para a imagem e multiplica pelo fator desejados
double amp = 0;
double ang = Math.PI * 0.5;
for (Int32 a = 0; a < StartImage.Height; a++)
{
int y = (int)((StartImage.Height / 2) - amp * Math.Sin(ang));
if ((y < 0) || (y > StartImage.Height))
break;
amp = a;
}
amp = (amp - 2) * (factor < -1 ? -1 : (factor > 1 ? 1 : factor));
//Define variáveis que calcula os pontos de corte (se houver)
Int32 x1, y1, x2, y2;
x1 = StartImage.Width;
y1 = StartImage.Height;
x2 = 0;
y2 = 0;
//Copia pixel a pixel para as novas posições
index = ((1 * StartImage.Width) + 1) * cCount;
do
{
Int32 y = (Int32)((index / cCount) / StartImage.Width);
Int32 x = (index / cCount) - (y * StartImage.Width);
System.Drawing.Point pt = NewPoint(new System.Drawing.Point(x, y), StartImage.Width, StartImage.Height, amp, factor < 0);
//Valores para crop
if (factor >= 0)
{
if (x == StartImage.Width / 2)
{
if (pt.Y < y1)
y1 = pt.Y;
if (pt.Y > y2)
y2 = pt.Y;
}
if (y == StartImage.Height / 2)
{
if (pt.X < x1)
x1 = pt.X;
if (pt.X > x2)
x2 = pt.X;
}
}
else
{
if ((x == 1) && (y == 1))
{
y1 = pt.Y;
x1 = pt.X;
}
if ((x == StartImage.Width - 1) && (y == StartImage.Height - 1))
{
y2 = pt.Y;
x2 = pt.X;
}
}
//Indice de bytes onde será aplicada o pixel
Int32 dstIndex = ((pt.Y * StartImage.Width) + pt.X) * cCount;
if (Depth == 32)
{
dstPixels[dstIndex] = srcPixels[index++];
dstPixels[dstIndex + 1] = srcPixels[index++];
dstPixels[dstIndex + 2] = srcPixels[index++];
dstPixels[dstIndex + 3] = srcPixels[index++]; // a
}
if (Depth == 24)
{
dstPixels[dstIndex] = srcPixels[index++];
dstPixels[dstIndex + 1] = srcPixels[index++];
dstPixels[dstIndex + 2] = srcPixels[index++];
}
if (Depth == 8)
{
dstPixels[dstIndex] = srcPixels[index++];
}
} while (index < srcPixels.Length);
//Cria a nova imagem com base no array de bytes previamente criado
NewImage = new Bitmap(StartImage.Width, StartImage.Height, StartImage.PixelFormat);
NewImage.SetResolution(StartImage.HorizontalResolution, StartImage.VerticalResolution);
dstBitmapData = NewImage.LockBits(new Rectangle(0, 0, StartImage.Width, StartImage.Height), ImageLockMode.WriteOnly, StartImage.PixelFormat);
Marshal.Copy(dstPixels, 0, dstBitmapData.Scan0, dstPixels.Length);
NewImage.UnlockBits(dstBitmapData);
/*
// Para efeito de visualização, desenha o quadrado onde será realizado o corte
Graphics g2 = Graphics.FromImage(NewImage);
g2.SmoothingMode = SmoothingMode.AntiAlias;
g2.InterpolationMode = InterpolationMode.HighQualityBicubic;
g2.PixelOffsetMode = PixelOffsetMode.HighQuality;
g2.DrawRectangle(new Pen(new SolidBrush(Color.Red), 3), new Rectangle(x1, y1, x2 - x1, y2 - y1));
g2.Dispose();*/
//Gera a imagem final, com crop ou coo o redimencionamento real
Bitmap FinalImage = new Bitmap(sourceImage.Width, sourceImage.Height, StartImage.PixelFormat);
NewImage.SetResolution(StartImage.HorizontalResolution, StartImage.VerticalResolution);
Graphics g1 = Graphics.FromImage(FinalImage);
g1.SmoothingMode = SmoothingMode.AntiAlias;
g1.InterpolationMode = InterpolationMode.HighQualityBicubic;
g1.PixelOffsetMode = PixelOffsetMode.HighQuality;
//Realiza o corte se estiver habilitado o corte automático e houver necessidade de corte
if ((autoCrop) && ((x1 > 0) || (y1 > 0) || (x2 < NewImage.Height) || (y2 < NewImage.Height)) && false)
{
Rectangle cropRect = new Rectangle(x1, y1, x2 - x1, y2 - y1);
g1.DrawImage(NewImage, new Rectangle(-1, -1, FinalImage.Width + 1, FinalImage.Height + 1), cropRect.X, cropRect.Y, cropRect.Width, cropRect.Height, GraphicsUnit.Pixel);
}
else
{
g1.DrawImage(NewImage, new Rectangle(-1, -1, FinalImage.Width + 1, FinalImage.Height + 1), 0, 0, NewImage.Width, NewImage.Height, GraphicsUnit.Pixel);
}
g1.Dispose();
g1 = null;
NewImage = null;
return FinalImage;
}
finally
{
srcBitmapData = null;
srcPixels = null;
dstPixels = null;
dstBitmapData = null;
}
}
private static System.Drawing.Point NewPoint(System.Drawing.Point AtualPoint, Int32 Width, Int32 Height, double Aplitude, Boolean inverse)
{
System.Drawing.Point uP = AtualPoint;
int pY, pX;
double aY, aX;
aY = aX = 0;
double angX = Math.PI * 1 * (double)uP.X / (double)Width;
double caX = Aplitude * ((((double)Height / 2F) - (double)uP.Y) / ((double)Height / 2F));
double angY = Math.PI * 1 * (double)uP.Y / (double)Height;
double caY = Aplitude * ((((double)Width / 2F) - (double)uP.X) / ((double)Width / 2F));
if (inverse)
{
double iAng = Math.PI * -1 * 0.5;
aX = (caX * Math.Sin(iAng));
aY = (caY * Math.Sin(iAng));
}
pY = (int)(uP.Y + aX + caX * Math.Sin(angX));
pX = (int)(uP.X + aY + caY * Math.Sin(angY));
return new System.Drawing.Point(pX, pY);
}
private void pictureBox5_Click(object sender, EventArgs e)
{
}
}
}