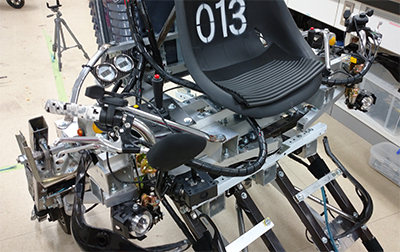
Proto
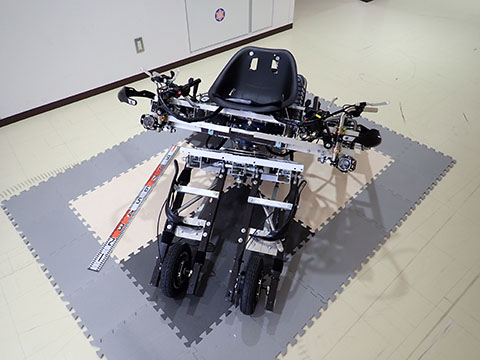
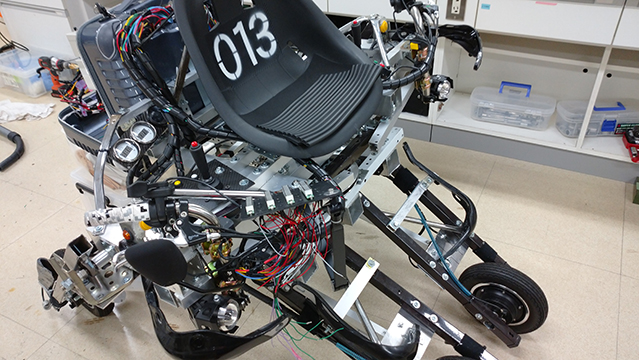
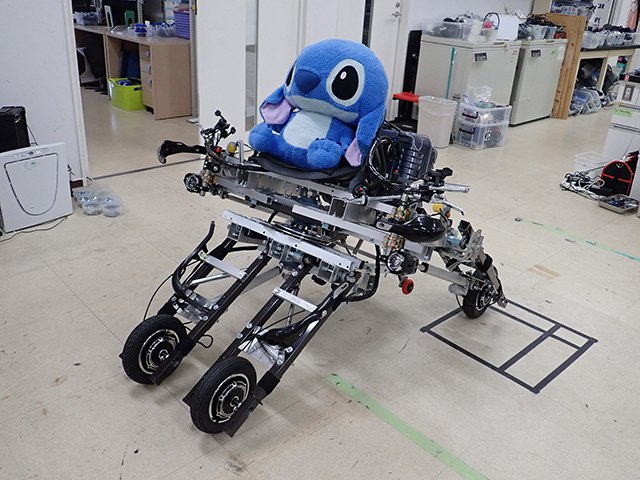
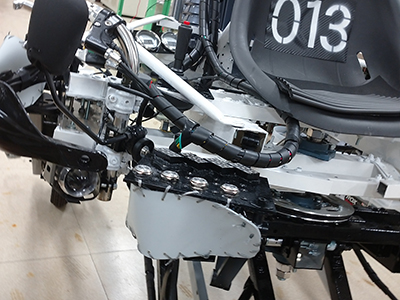
EVmodel013 Ikakkun
"4WD and 4legs"
proposed by
Prof.Satoshi Nishimura
/ Jichi Med Univ(JAPAN)
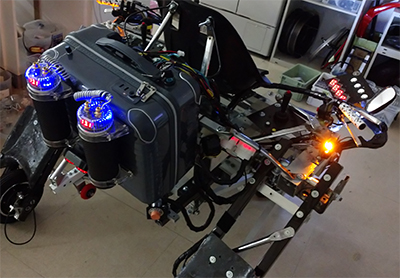
Specs:
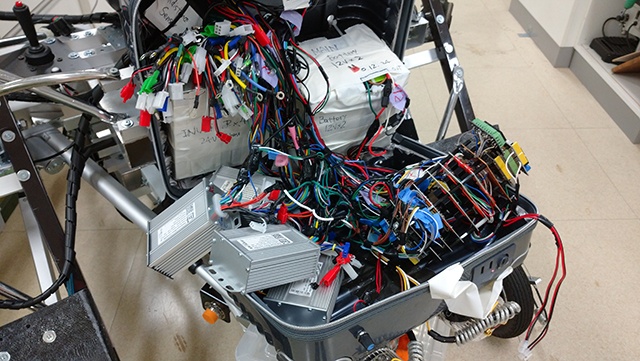
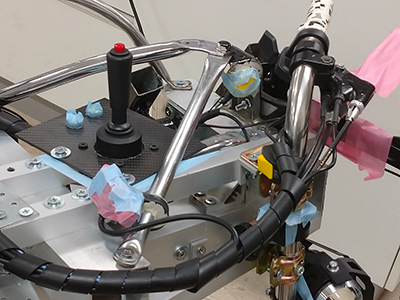
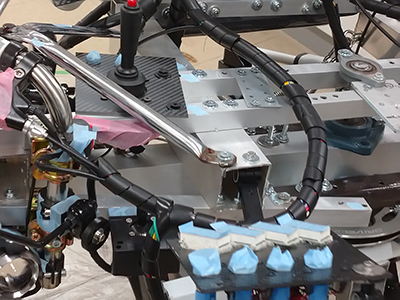
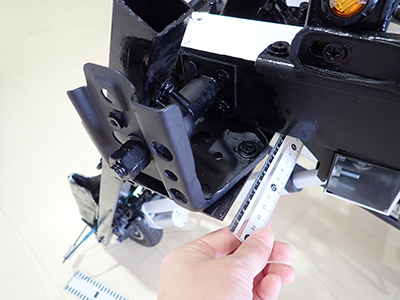
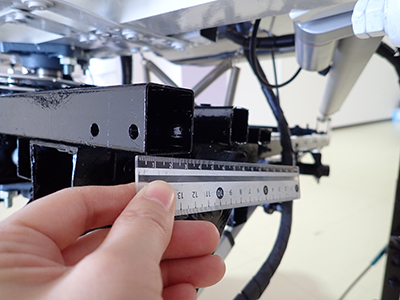
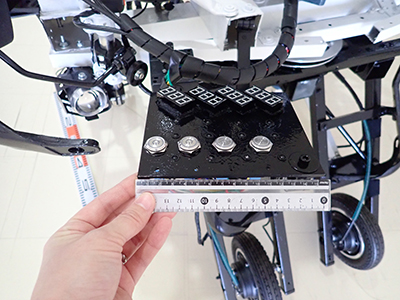
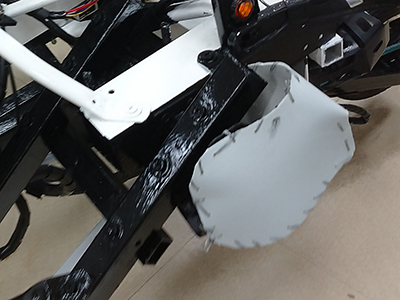
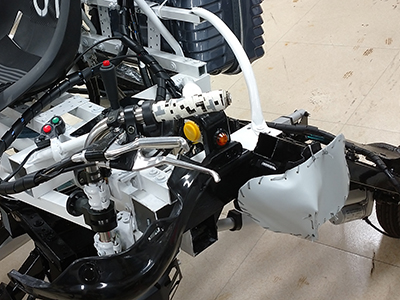
1230x1460x900mm 117.9kg. 4x1500N & 1x500N actuators.
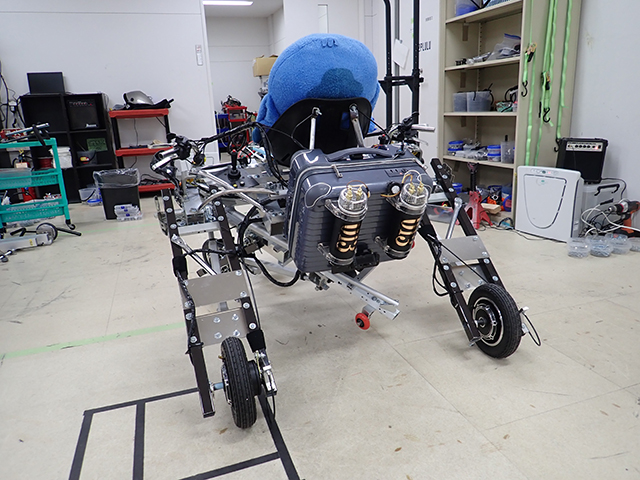
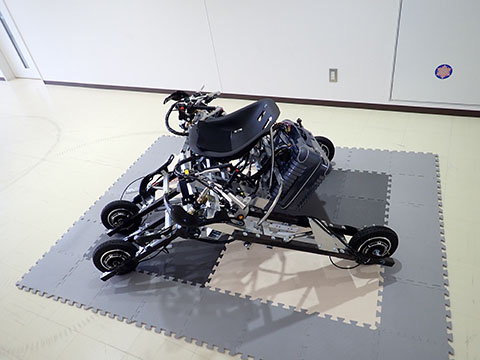
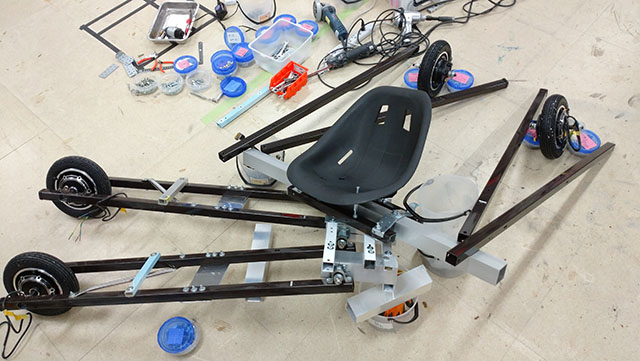
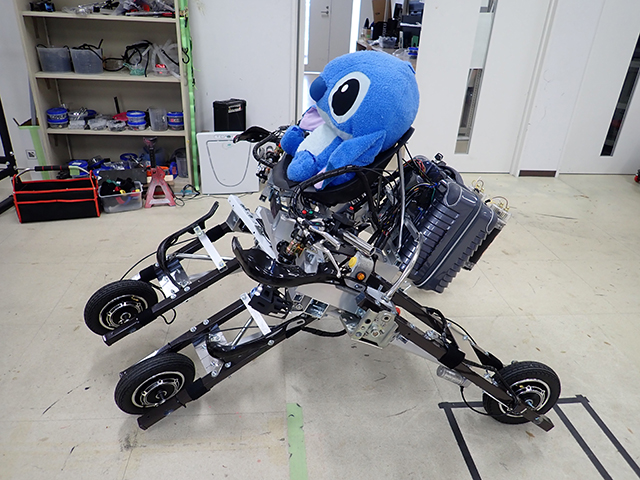
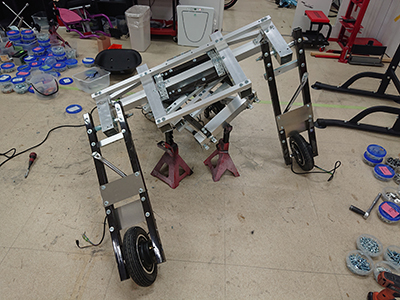
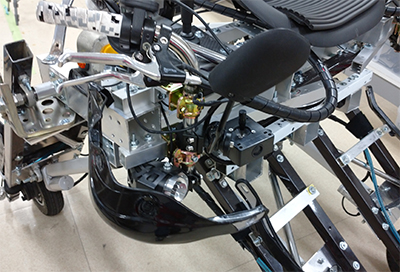
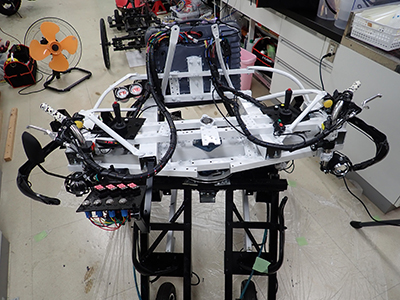
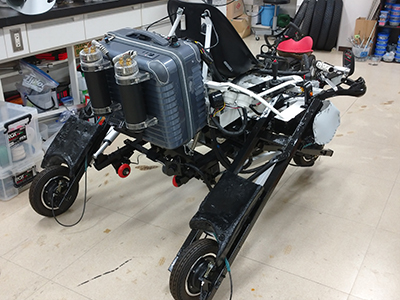
Mobile robots in reality. 4-wheels-driven, 4-independent-foldable-legs, 4-brakes.
Independ 4 legs can run, stop, and fold themselves independently.
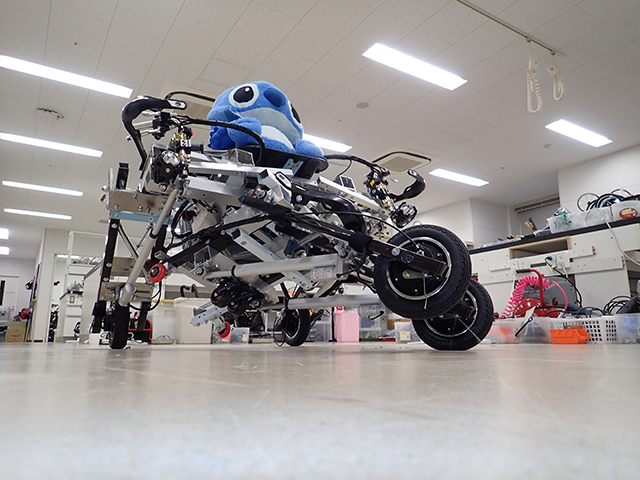
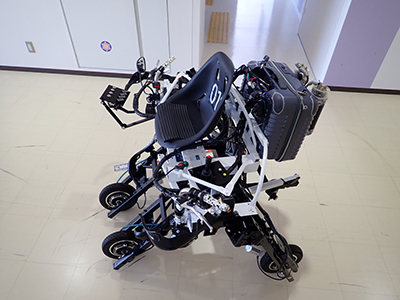
Walking robots? Here! This prototype is the 1st in reality.
Robot changes his position, direction, and speed with 4 legs.
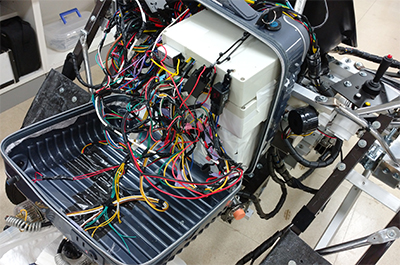
You need intelligence for controlling 4 legs. Are you ready to go?
Officially patented (independent, single author, patent).
E-mail:
If interested (snishi-tky(a-mark)ninus.ocn.ne.jp )